Substation Relay Protection Training
Our customized live online or in‑person group training can be delivered to your staff at your location.

- Live Online
- 12 hours Instructor-led
- Group Training Available
Regular Price:
$699
Coupon Price:
$599
WASHINGTON
—
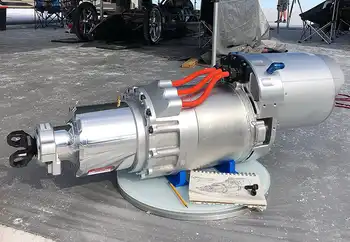
Electric Car Motors convert electricity to torque via rotor-stator magnetic fields, using AC/DC inverters, permanent magnets or induction designs; they power EV powertrains efficiently and enable regenerative braking for energy recovery and control.
Main Details
Electric car motors turn electrical energy into wheel torque using rotor-stator fields, inverters, and AC or DC control.
AC induction, PMSM, BLDC, and reluctance architectures explained
Inverters manage AC/DC, voltage, and motor speed via frequency
Regenerative braking recovers energy and reduces wear
When was the last time you stopped to think about how electric cars actually work, especially if you're wondering whether to buy an electric car today? We superfans of the car biz have mostly developed a reasonable understanding of how combustion powertrains work. Most of us can visualize fuel and air entering a combustion chamber, exploding, pushing a piston down, and rotating a crankshaft that ultimately turns the wheels. We generally understand the differences between inline, flat, vee-shaped, and maybe even Wankel rotary combustion engines.
Mechanical engineering concepts such as these are comparatively easy to comprehend. But it's probably a fair bet to wager that only a minority of folks reading this can explain on a bar napkin exactly how invisible electrons turn a car's wheels or how a permanent-magnet motor differs from an AC induction one. Electrical engineering can seem like black magic and witchcraft to car nuts, so it's time to demystify this bold new world of electromobility, with the age of electric cars arriving ahead of schedule.
How Electric Cars Work: Motors
It has to do with magnetism and the natural interplay between electric fields and magnetic fields. When an electrical circuit closes allowing electrons to move along a wire, those moving electrons generate an electromagnetic field complete with a north and a south pole. When this happens in the presence of another magnetic field—either from a different batch of speeding electrons or from Wile E. Coyote's giant ACME horseshoe magnet, those opposite poles attract, and like poles repel each other.
Electric motors work by mounting one set of magnets or electromagnets to a shaft and another set to a housing surrounding that shaft. By periodically reversing the polarity (swapping the north and south poles) of one set of electromagnets, the motor leverages these attracting and repelling forces to rotate the shaft, thereby converting electricity into torque and ultimately turning the wheels, in a sector where the electric motor market is growing rapidly worldwide. Conversely—as in the case of regenerative braking—these magnetic/electromagnetic forces can transform motion back into electricity.
How Electric Cars Work: AC Or DC?
The electricity supplied to your home arrives as alternating current (AC), and bidirectional charging means EVs can power homes for days as needed, so-called because the north/south or plus/minus polarity of the power changes (alternates) 60 times per second. (That is, in the United States and other countries operating at 110 volts; countries with a 220-volt standard typically use 50-Hz AC.) Direct current (DC) is what goes into and comes out of the + and - poles of every battery. As noted above, motors require alternating current to spin. Without it, the electromagnetic force would simply lock their north and south poles together. It's the cycle of continually switching north and south that keeps a motor spinning.
Today's electric cars are designed to manage both AC and DC energy on board. The battery stores and dispenses DC current, but again, the motor needs AC. When recharging the battery, and with increasing grid coordination enabling flexibility, the energy comes into the onboard charger as AC current during Level 1 and Level 2 charging and as DC high-voltage current on Level 3 "fast chargers." Sophisticated power electronics (which we will not attempt to explain here) handle the multiple onboard AC/DC conversions while stepping the voltage up and down from 100 to 800 volts of charging power to battery/motor system voltages of 350-800 volts to the many vehicle lighting, infotainment, and chassis functions that require 12-48-volt DC electricity.
How Electric Cars Work: What Types Of Motors?
DC Motor (Brushed): Yes, we just said AC makes the motor go around, and these old-style motors that powered early EVs of the 1900s are no different. DC current from the battery is delivered to the rotor windings via spring-loaded "brushes" of carbon or lead that energize spinning contacts connected to wire windings. Every few degrees of rotation, the brushes energize a new set of contacts; this continually reverses the polarity of the electromagnet on the rotor as the motor shaft turns. (This ring of contacts is known as the commutator).
The housing surrounding the rotor's electromagnetic windings typically features permanent magnets. (A "series DC" or so-called "universal motor" may use an electromagnetic stator.) Advantages are low initial cost, high reliability, and ease of motor control. Varying the voltage regulates the motor's speed, while changing the current controls its torque. Disadvantages include a lower lifespan and the cost of maintaining the brushes and contacts. This motor is seldom used in transportation today, save for some Indian railway locomotives.
Brushless DC Motor (BLDC): The brushes and their maintenance are eliminated by moving the permanent magnets to the rotor, placing the electromagnets on the stator (housing), and using an external motor controller to alternately switch the various field windings from plus to minus, thereby generating the rotating magnetic field.
Advantages are a long lifespan, low maintenance, and high efficiency. Disadvantages are higher initial cost and more complicated motor speed controllers that typically require three Hall-effect sensors to get the stator-winding current phased correctly. That switching of the stator windings can result in "torque ripple"—periodic increases and decreases in the delivered torque. This type of motor is popular for smaller vehicles like electric bikes and scooters, and it's used in some ancillary automotive applications like electric power steering assist.

Permanent-Magnet Synchronous Motor (PMSM): Physically, the BLDC and PMSM motors look nearly identical. Both feature permanent magnets on the rotor and field windings in the stator. The key difference is that instead of using DC current and switching various windings on and off periodically to spin the permanent magnets, the PMSM functions on continuous sinusoidal AC current. This means it suffers no torque ripple and needs only one Hall-effect sensor to determine rotor speed and position, so it's more efficient and quieter.
The word "synchronous" indicates the rotor spins at the same speed as the magnetic field in the windings. Its big advantages are its power density and strong starting torque. A main disadvantage of any motor with spinning permanent magnets is that it creates "back electromotive force" (EMF) when not powered at speed, which causes drag and heat that can demagnetize the motor. This motor type also sees some duty in power steering and brake systems, but it has become the motor design of choice in most of today's battery electric and hybrid vehicles.
Note that most permanent-magnet motors of all kinds orient their north-south axis perpendicular to the output shaft. This generates "radial (magnetic) flux." A new class of "axial flux" motors orients the magnets' N-S axes parallel to the shaft, usually on pairs of discs sandwiching stationary stator windings in between. The compact, high-torque axial flux orientation of these so-called "pancake motors" can be applied to either BLDC or PMSM type motors.
AC Induction: For this motor, we toss out the permanent magnets on the rotor (and their increasingly scarce rare earth materials) and keep the AC current flowing through stator windings as in the PMSM motor above.
Standing in for the magnets is a concept Nikola Tesla patented in 1888: As AC current flows through various windings in the stator, the windings generate a rotating field of magnetic flux. As these magnetic lines pass through perpendicular windings on a rotor, they induce an electric current. This then generates another magnetic force that induces the rotor to turn. Because this force is only induced when the magnetic field lines cross the rotor windings, the rotor will experience no torque or force if it rotates at the same (synchronous) speed as the rotating magnetic field.
This means AC induction motors are inherently asynchronous. Rotor speed is controlled by varying the alternating current's frequency. At light loads, the inverter controlling the motor can reduce voltage to reduce magnetic losses and improve efficiency. Depowering an induction motor during cruising when it isn't needed eliminates the drag created by a permanent-magnet motor, while dual-motor EVs using PMSM motors on both axles must always power all motors. Peak efficiency may be slightly greater for BLDC or PMSM designs, but AC induction motors often achieve higher average efficiency. Another small trade-off is slightly lower starting torque than PMSM. The GM EV1 of the mid-1990s and most Teslas have employed AC Induction motors, despite skepticism about an EV revolution in some quarters.
Reluctance Motor: Think of "reluctance" as magnetic resistance: the degree to which an object opposes magnetic flux. A reluctance motor's stator features multiple electromagnet poles—concentrated windings that form highly localized north or south poles. In a switched reluctance motor (SRM), the rotor is made of soft magnetic material such as laminated silicon steel, with multiple projections designed to interact with the stator's poles. The various electromagnet poles are turned on and off in much the same way the field windings in a BLDC motor are. Using an unequal number of stator and rotor poles ensures some poles are aligned (for minimum reluctance), while others are directly in between opposite poles (maximum reluctance). Switching the stator polarity then pulls the rotor around at an asynchronous speed.
A synchronous reluctance motor (SynRM) doesn't rely on this imbalance in the rotor and stator poles. Rather, SynRM motors feature a more distributed winding fed with a sinusoidal AC current as in a PMSM design, with speed regulated by a variable-frequency drive, and an elaborately shaped rotor with voids shaped like magnetic flux lines to optimize reluctance.
The latest trend is to place small permanent magnets (often simpler ferrite ones) in some of these voids to take advantage of both magnetic and reluctance torque while minimizing cost and the back EMF (or counter-electromotive force) high-speed inefficiencies that permanent-magnet motors suffer.
Advantages include lower cost, simplicity, and high efficiency. Disadvantages can include noise and torque ripple (especially for switched reluctance motors). Toyota introduced an internal permanent-magnet synchronous reluctance motor (IPM SynRM) on the Prius, and Tesla now pairs one such motor with an AC induction motor on its Dual Motor models. Tesla also uses IPM SynRM as the single motor for its rear-drive models.
Electric motors may never sing like a small-block or a flat-plane crank Ferrari. But maybe, a decade or so from now, we'll regard the Tesla Plaid powertrain as fondly as we do those engines, even as industry leaders note that mainstream adoption faces hurdles, and every car lover will be able to describe in intimate detail what kind of motors it uses.
Related News
Related News

Can food waste be turned into green hydrogen to produce electricity?
Food Waste to Green Hydrogen uses biological production to create clean energy, enabling waste-to-energy, decarbonization,…
View more

World Bank helps developing countries wind spurt
World Bank Offshore Wind Investment drives renewables and clean energy in developing countries, funding floating…
View more

BC Hydro electric vehicle fast charging site operational in Lillooet
BC Hydro Lillooet EV fast charging launches a pull-through, DC fast charger hub for electric…
View more

US: In 2021, Plug-Ins Traveled 19 Billion Miles On Electricity
US Plug-in EV Miles 2021 highlight BEV and PHEV growth, DOE and Argonne data, 19.1…
View more

Volvo Trucks to launch complete range of electric trucks in Europe in 2021
Volvo Electric Heavy-Duty Trucks lead Europe’s e-mobility shift, meeting strict emissions rules with battery-electric drivelines,…
View more

Texas battery rush: Oil state's power woes fuel energy storage boom
Texas Battery Storage Investment Boom draws BlackRock, SK, and UBS, leveraging ERCOT price volatility, renewable…
View more
Sign Up for Electricity Forum’s Newsletter
Stay informed with our FREE Newsletter — get the latest news, breakthrough technologies, and expert insights, delivered straight to your inbox.
Electricity Today T&D Magazine Subscribe for FREE
Stay informed with the latest T&D policies and technologies.
- Timely insights from industry experts
- Practical solutions T&D engineers
- Free access to every issue
